所有語言








分享
英偉達Jim Fan最新TED演講上線:AI下一個前沿是「基礎智能體」!
巴比特_AIGC452天前
原文來源:新智元

圖片來源:由無界 AI生成
英偉達高級科學家Jim Fan在TED AI 2023上的演講視頻上線了——AI的下一個前沿將是「基礎智能體」。
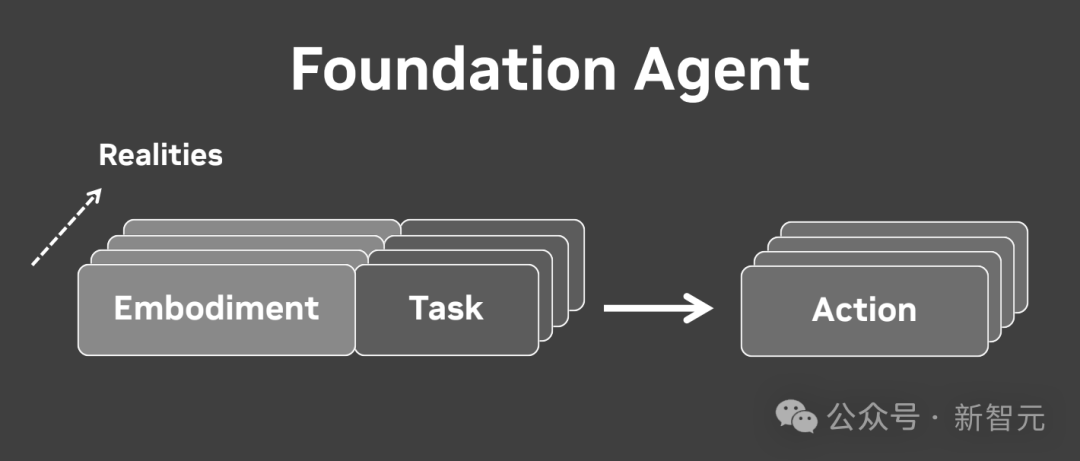
「AI的下一個前沿將是『基礎智能體』(Foundation Agent)——一個掌握廣泛技能,控制許多身體,並能夠泛化到多個環境中的單一算法」。
等了三個月,英偉達高級科學家Jim Fan在TED AI 2023上的演講視頻終於上線了。

視頻中,Jim Fan提出了「Foundation Agent」,一個可以在虛擬世界和現實世界里泛化的通用智能體模型。
他具體解釋了,這項技術將如何從根本上改變我們的生活,滲透到從視頻遊戲和元宇宙,到無人機、仿人機器人的方方面面,並探討了單一模型如何掌握跨越這些不同現實的技能。
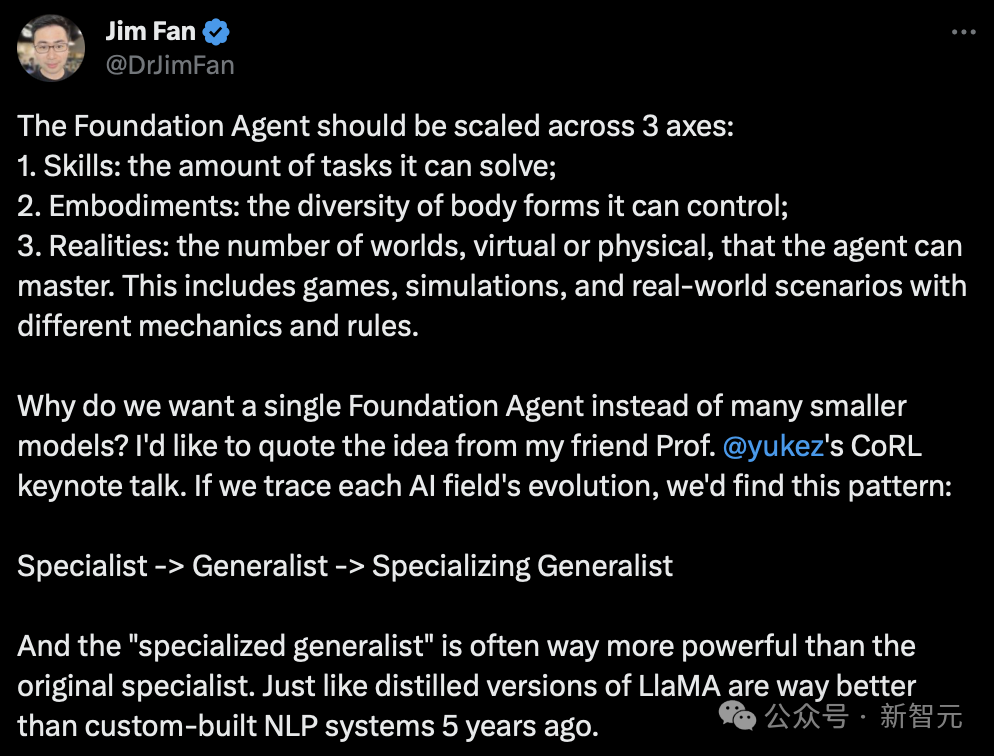
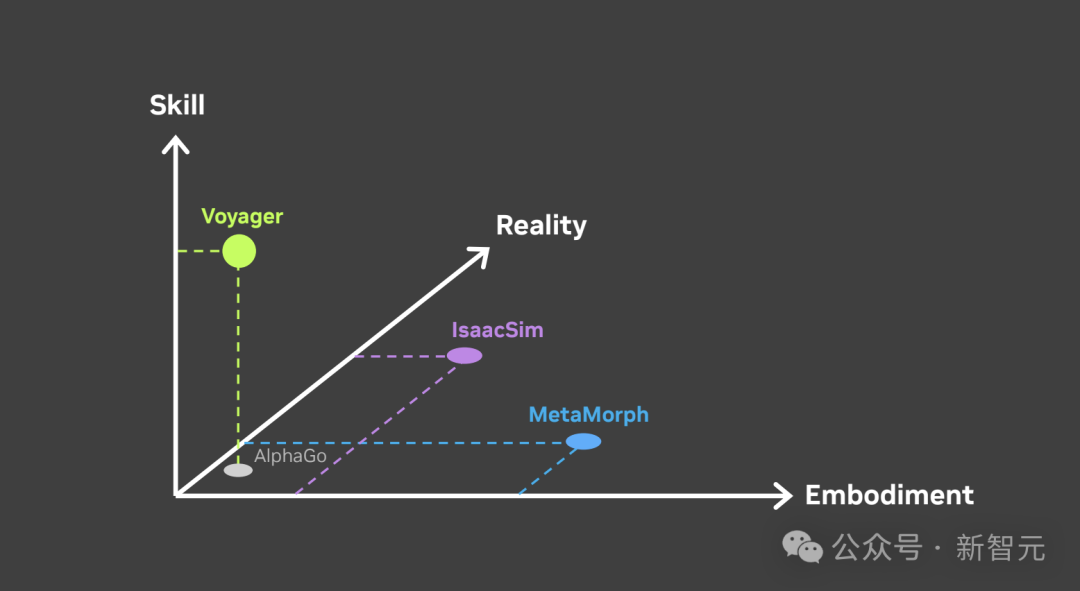
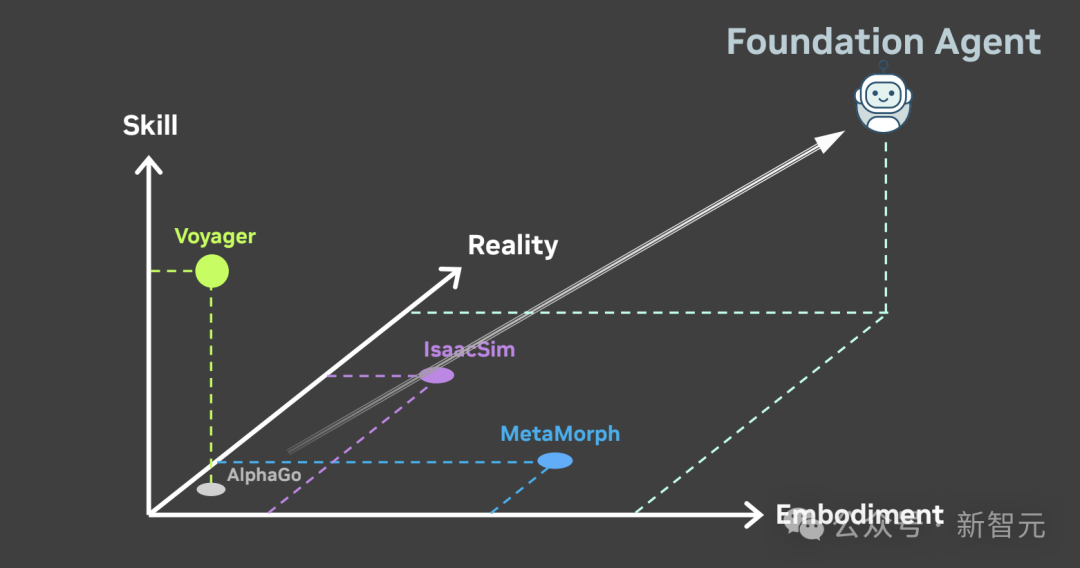
Jim Fan認為,「基礎智能體」應該在3個維度上進行擴展:
- 技能:能解決的任務數量;
- 具身:能控制的身體形態的多樣性;
- 現實:智能體能掌握的虛擬或物理空間的數量。這包括有不同規則的遊戲、模擬和真實世界場景。
我們為什麼想要一個單一的「基礎智能體」,而不是許多更小的模型?
在每個AI領域的發展歷史中,都能發現這樣模式:從專家模型 -> 通用模型 -> 專業化的通用模型。
這裏的「專業化的通用模型」通常遠比原先的專家模型更強大,就像 LlaMA 的精鍊版本遠超過5年前的定製化NLP系統一樣。
此外,Jim Fan本人還分享了演講時的心得。
「在TED演講時,我腳下只有一個「信心」显示器,只显示當前的幻燈片和計時器。這意味着我需要完全記住整段演講。一開始讓我很擔心,但事實證明,這是與聽眾建立聯繫,直接觸及他們心靈的最佳方式」。
值得一提的是,Jim Fan還公開了這次演講的PPT,一起看看這場演講的精彩亮點吧。
TED演講全文
2016年的春天,我坐在哥倫比亞大學的一間教室里,並沒有專心聽講。相反,我正用電腦觀看一場棋盤遊戲錦標賽。
這不是一場普通的比賽,而是一場非常、非常特別的比賽——AlphaGo與李世石開啟對決。
這場比賽,AI在五盤棋中贏了三盤,成為有史以來第一個在圍棋比賽中擊敗人類冠軍的「棋手」。
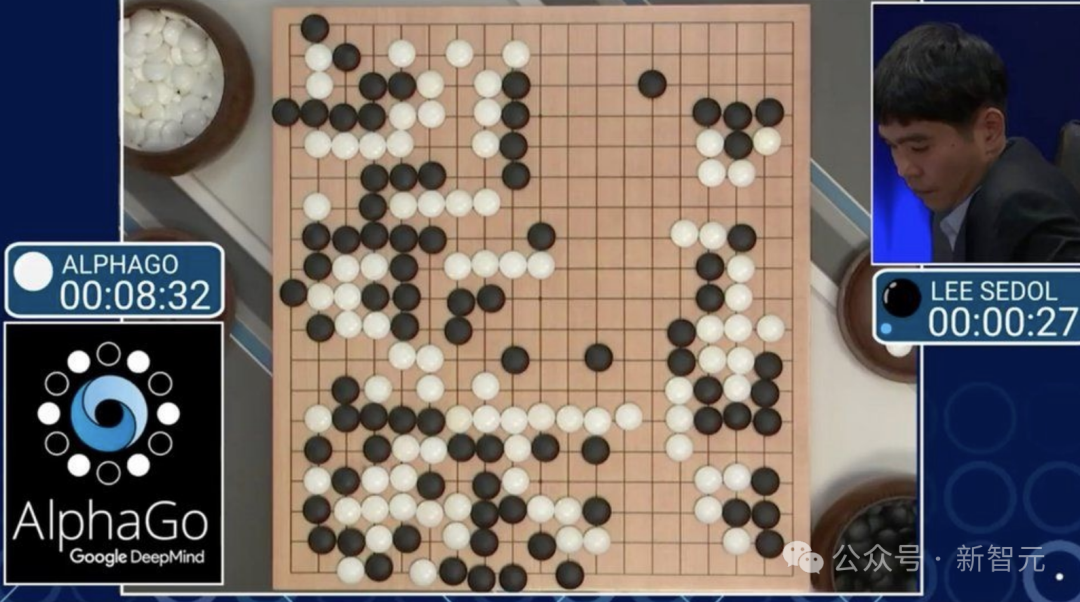
到現在,我仍然記得那天自己見證歷史的激動心情。AI智能體終於進入主流的時刻。
但當興奮褪去后,我意識到,AlphaGo雖然強大,但它只能做一件事,而且只能做一件事。
它無法玩任何其他遊戲,比如《超級馬里奧》、《我的世界》,當然也不能幫你洗臟衣服,或今晚為你做一頓豐盛的晚餐。
我們真正想要的是:像機器人Wall-E那樣多才多藝的AI智能體,像《星球大戰》中的各種各樣機器人的載體或化身。


又或是像《頭號玩家》一樣,可以跨越無限的虛擬或現實世界。
那麼我們如何在不久的將來實現這些科幻想法呢?

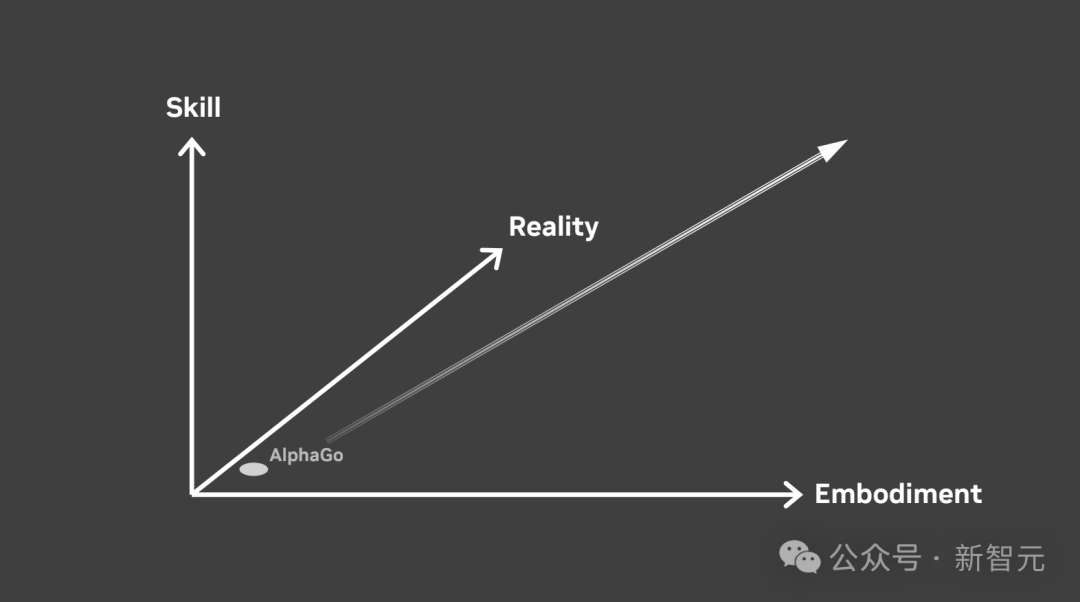
如下左圖是邁向通用AI智能體的一個實踐者指南。當前的大多數研究工作按以下三個維度展開:
AI智能體可以掌握的技能數量;可以控制的身體形態或載體;以及它所能掌握的現實情況。AlphaGo就在左下角的位置,但右上角才是我們真正要達到的目標。
Voyager玩轉「我的世界」
接下來,讓我們一次看一個維度。
今年早些時候,我帶領了「Voyager」項目,這是一個能在多種技能上大規模擴展的智能體。沒有任何遊戲能比《我的世界》更好地支持無限的創造性玩法。
這有一個有趣的事實:《我的世界》現在有1.4億活躍玩家。這個数字相當於英國人口的2倍多。

這款遊戲之所以如此受歡迎,是因為它是開放式的:沒有固定的遊戲情節,你可以在遊戲中做任何想做的事情。
當我們讓Voyager在《我的世界》中自由活動時,會發現它可以在沒有任何人干預的情況下,連續玩上幾個小時的遊戲。
這段視頻展示了Voyager在一次遊戲中連續行動的片段。

它可以探索地形,開採各種材料,與怪物戰鬥,製作數百種配方,並解鎖一個不斷擴展的技能樹。
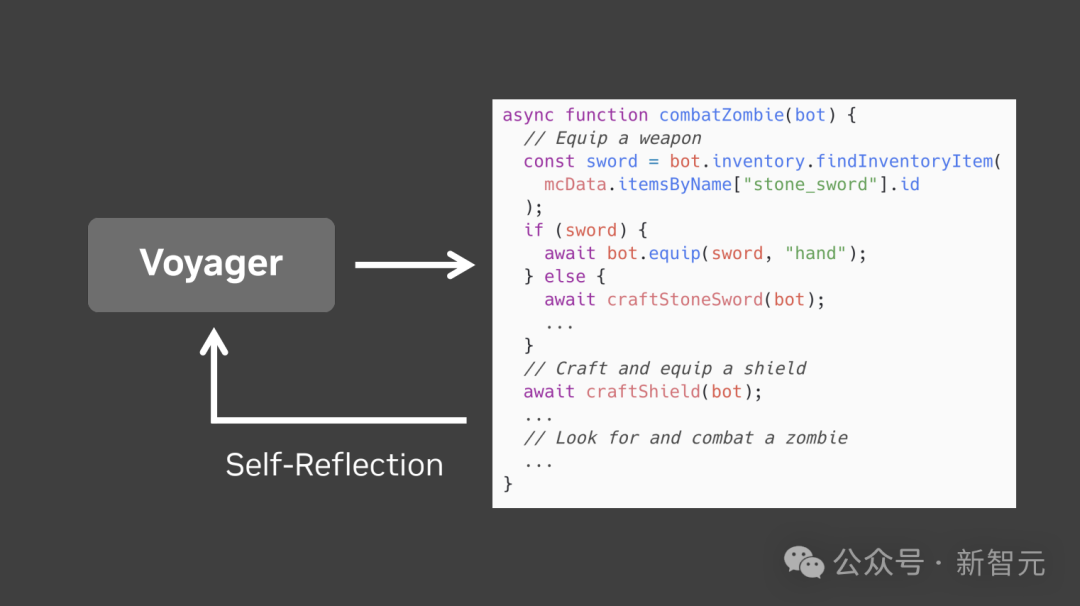
那麼,其中的奧妙是什麼呢?核心要義是「編碼即行動」。
首先,我們使用社區製作的Minecraft JavaScript API將3D世界轉換為文本表示。Voyager調用GPT-4,用JavaScript編寫代碼片段,這些代碼片段將成為遊戲中的可執行技能。
然而,就像人類工程師一樣,Voyager也會犯錯。它並不總是在第一次嘗試時,就正確地完成程序。
因此,我們為它添加了一個「自我反思」機制,以便改進。
「自我反思」有三個反饋來源:JavaScript代碼執行錯誤;智能體狀態,如健康和飢餓;以及世界狀態,如附近的地形和敵人。
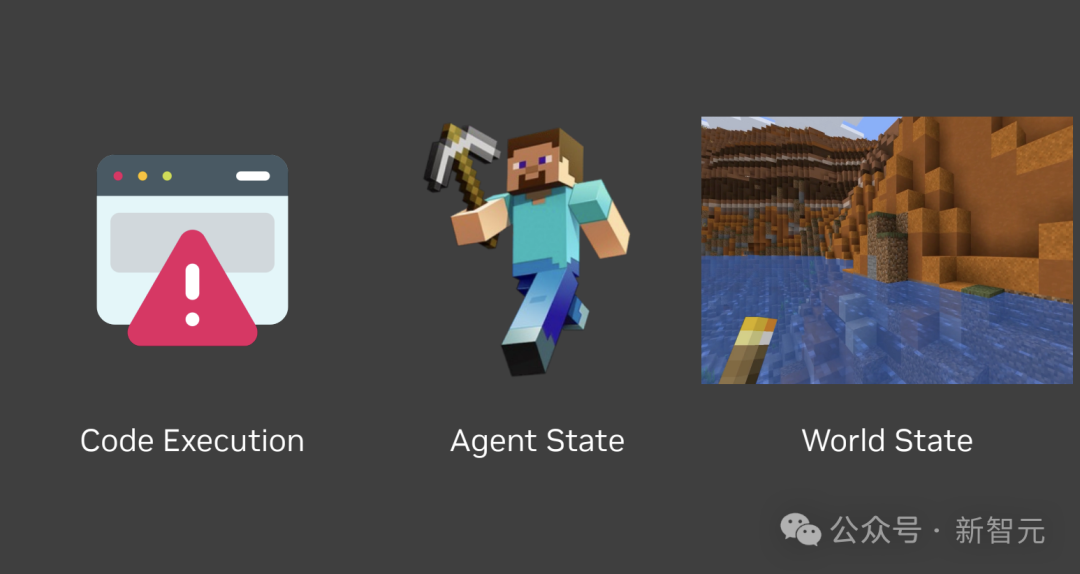
因此,Voyager會執行一個動作,觀察這個動作對世界和自身的影響,反思如何才能做得更好,並嘗試一些新的行動方案,然後不斷重複。
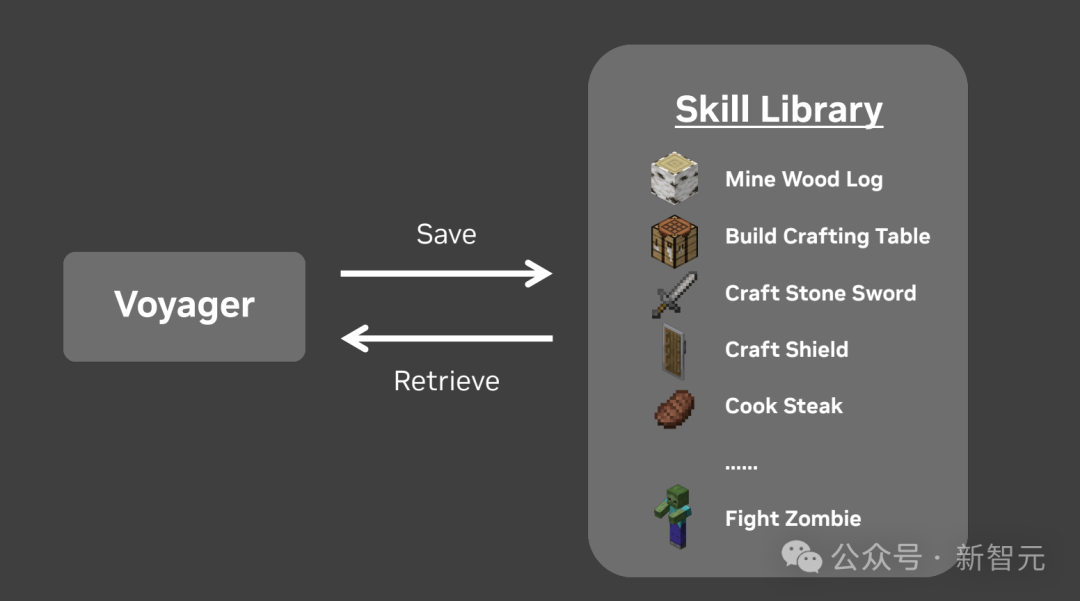
一旦技能成熟,Voyager就會把它保存到技能庫中,作為一種持久的記憶。
你可以把技能庫看作一個完全由語言模型編寫的代碼庫。
通過這種方式,Voyager在《我的世界》中探索和實驗過程中,能夠以遞歸的方式擴展自身的能力。
讓我們一起看個例子。
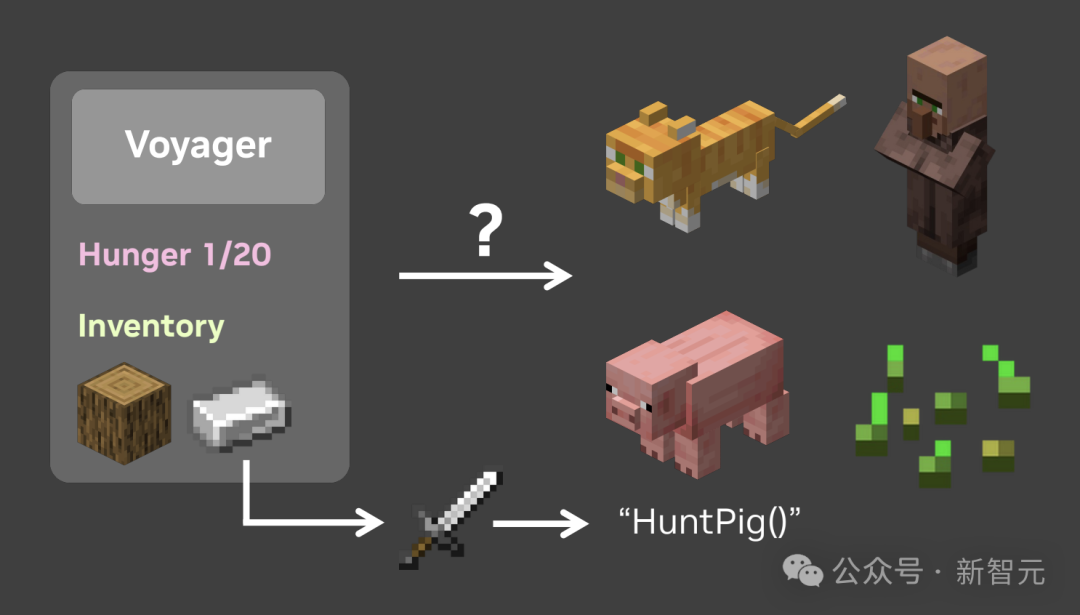
Voyager發現自己很餓,需要儘快獲得食物。它檢測到附近有四個實體:一隻貓、一個村民、一頭豬和一些小麥種子。
Voyager開始了內心獨白:「我要殺死貓,還是村民來獲取食物?這主意糟透了。小麥種子如何?我可以用種子種植農場,但那需要很長時間。對不起,小豬,你被選中了」。
隨後,Voyager在它的物品欄中發現了一塊鐵。
於是,它從技能庫中回想起了一箇舊技能來製作鐵劍,並開始學習一個新技能「獵豬」。現在我們也知道,不幸的是,Voyager不是素食主義者。
還有一個問題:Voyager如何無限期地探索下去?
我們只給了它一個高級指令,那就是盡可能多地獲取獨一無二的物品。
Voyager自己實現了一個curriculum:主動找到逐步更難、更新穎的挑戰來解決。

將所有這些整合在一起,Voyager不僅能掌握,還能在過程中發現新的技能。而我們沒有預先編程任何內容,一切都是Voyager的主意。
當一個智能體永遠充滿好奇心,永遠追求新的探險,這就是我們所說的終身學習。與AlphaGo相比,Voyager能做的事情非常多,但仍只能在《我的世界》中控制一個身體。

MetaMorph讓AI有多個身體
那麼問題來了:我們能否有一個可以在不同載體上工作的算法?一起來看MetaMorph,這是我在斯坦福共同開發的一個項目。

我們創建了一個基礎模型,它不僅能控制一個機器人,還能控制數千個手臂和腿部配置各異的機器人。
Metamorph能夠處理來自不同機器人身體的各種運動特徵。
如下我們如何創建MetaMorph的直觀方法。首先,我們設計一個特殊的詞來描述身體部件,這樣每個機器人本質上就是用這種詞寫成的一句話。
然後,我們對其應用Transformer,就像ChatGPT一樣,但MetaMorph寫出的不是文本,而是運動控制。
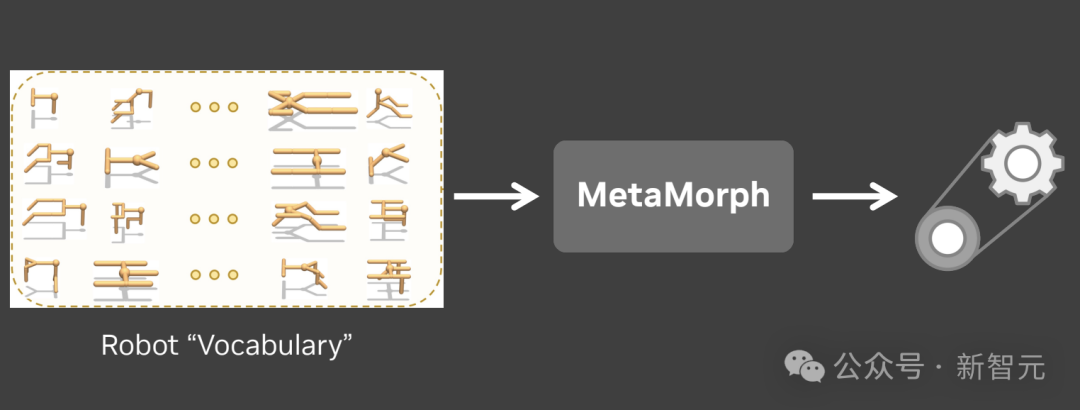
我們展示了MetaMorph能夠控製成千上萬個機器人上下樓梯、穿越複雜地形,避開障礙物。
放眼未來,如果我們可以大大擴展這個機器人詞彙量,我設想MetaMorph 2.0將能夠泛化到機器手、人形機器人、狗、無人機甚至更多領域。
與Voyager相比,MetaMorph在多體控制方面邁出了一大步。
不同虛擬環境模擬
現在,讓我們將一切再提升一個層次,在不同的環境之間轉移技能和載體。來看IsaacSim,這是英偉達的模擬平台。
IsaacSim最大的優勢是,將物理模擬加速到比實時快1000倍。
例如,這個小人只用了3天的模擬時間,就通過10年的高強度訓練,學會了令人印象深刻的武術。
這很像電影《黑客帝國》中的虛擬訓練場景(sparring dojo)。
而這個賽車場景則是,仿真技術跨過「恐怖谷」的地方。
多虧了硬件加速光線追蹤技術,我們才能渲染出極其複雜的場景,並呈現出令人嘆為觀止的細節。
你在這裏看到的逼真效果將幫助我們訓練計算機視覺模型,這些模型將成為每個人工智能智能體的眼睛。
更重要的是,IsaacSim可以程序化地生成具有無限變化的世界,因此沒有兩個世界看起來是一樣的。
這裡有一個有趣的想法。
如果一個智能體能夠掌握10000個模擬,那麼它很有可能會泛化到真實物理世界,因為我們的世界也只是第10001個「實境」。讓我們沉浸其中吧。
隨着我們在這張圖上的進展,我們最終會到達右上角,那是一個能在所有三個軸上進行泛化的單一智能體,那就是「基礎智能體」。
我相信,基礎智能體的訓練將與ChatGPT非常相似。
所有語言任務都可以表達為文本輸入和文本輸出。無論是寫詩、將英語翻譯成西班牙語還是編寫Python代碼,都是一樣的。
而ChatGPT只需在大量數據中進行大規模擴展即可。
原理一樣。基礎智能體將任務提示作為輸入,並輸出操作。
我們只需在大量現實數據中對其進行大規模擴展,即可對其進行訓練。
我相信在未來,一切能夠移動的東西最終都將是自主的。
有一天我們會發現,所有的AI智能體,無論是《Wall-E》、《星球大戰》,還是《頭號玩家》。
無論是在物理空間還是虛擬空間,對於同一個基礎智能體來說都只是不同的提示。

朋友們,這將是我們探索人工智能的下一個巨大挑戰。
參考資料:
https://twitter.com/DrJimFan/status/1749484835369050392?t=AMTNpOyjZqTgx0x2SUuhwA&s=19